DexROV deep sea test updates
The DexROV consortium has made the decision this week to continue testing activities in shallow water at a maximum depth of 100msw, and to cancel activities planned at 1000msw.…
The DexROV consortium has made the decision this week to continue testing activities in shallow water at a maximum depth of 100msw, and to cancel activities planned at 1000msw.…





DexROV consortium members have been busy this week making preparations for the final sea-testing of the DexROV system. In March this year, the system was integrated during a dry…
DexROV will be available for you to see in person at the Oceanology International conference in London from 13 – 15 March. Key DexROV experts will also give presentations…

Since the project’s conception DexROV partners have attending outreach events worldwide to promote our ideas, progress and research. Today we offer you a recap of where we’ve been and…

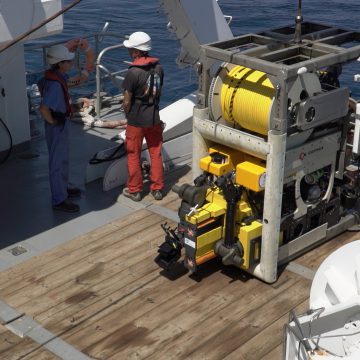
After two days of integration and testing, the DexROV system has been launched in the Marseille harbour for testing. These activities prepare the hardware and consortium partners for a…
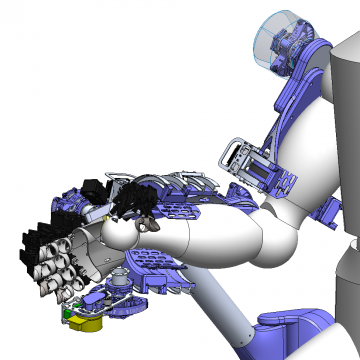
One of the goals of the DexROV project is to integrate fine, dexterous control of an ROV arm – from land. Space Applications Services (SPACEAPPS) in Belgium are the…
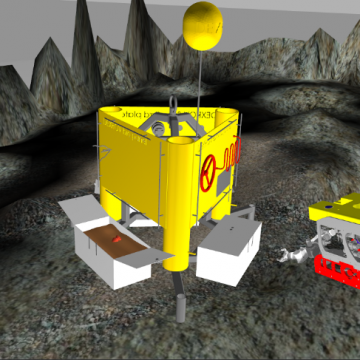
Testing new hardware and software systems is a high-stake activity. This is doubly true for systems at sea. If you test a robot at a depth of 1000 metres…

On 13-17 June, the DexROV consortium conducted the first testing and integration trial for DexROV. Each partner’s elements were assembled on the DexROV framework and the software systems were…
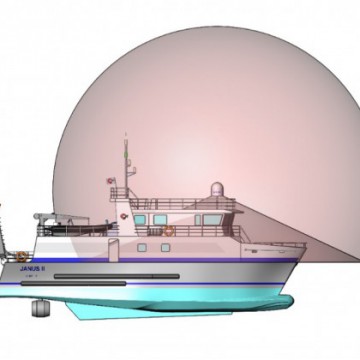
To prepare for the first DexROV integration and testing activities in Marseille this month SPACEAPPS is working with COMEX and Omniaccess to establish the satellite components for the link…

DexROV partner Idiap Research Institute has had their paper selected among award finalists at the IEEE International Conference on Robotics and Automation in Stockholm this month. The paper focused…