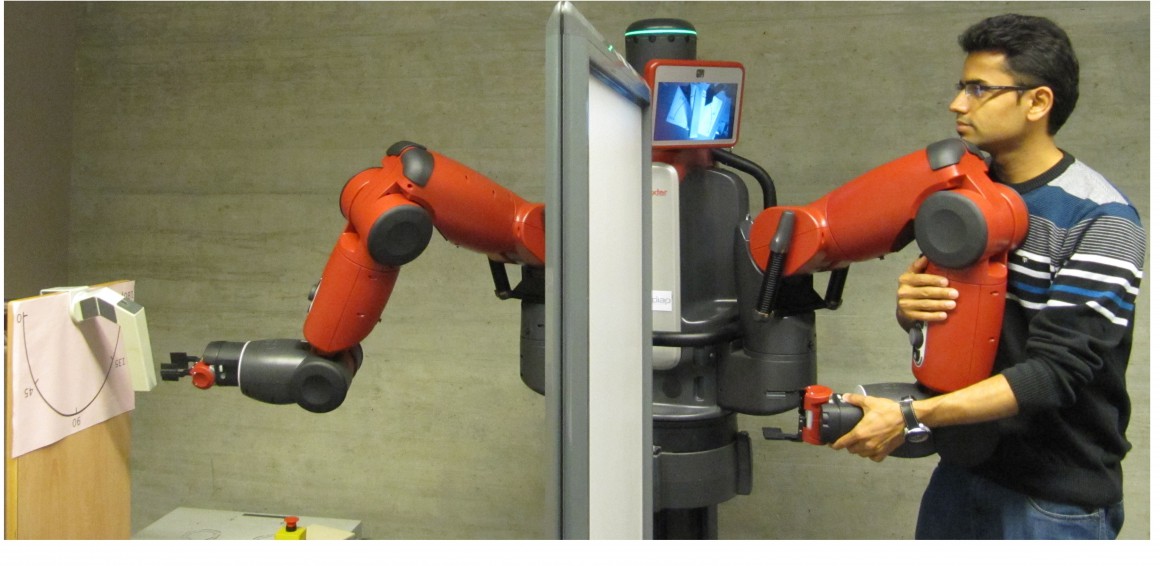
In the last year, the Idiap DexROV team has investigated approaches for skill primitive representation, including recognition and generation capabilities. They have built a working example of a teleoperation scenario using the “Baxter” robot. In this scenario the developed model is used on one of Baxter’s arms to recognize a motion primitive (from a set of primitives), after which the other robotic arm follows the corresponding primitive.
Each of Baxter’s arms has seven degrees of freedom, triggered by series-elastic actuators. This enables force/torque control of the joints and the robot’s end-effector (in this case a gripper). The controller is used to compensate for the effect of gravity, allowing users to kinesthetically demonstrate motions. Baxter’s left arm was the operator’s input, and his right the teleoperational output.
This is a test-platform or mock-up for DexROV where the left arm will later be replaced by the exoskeleton and input commands. The input arm will be replaced by the DexROV control interface (exoskeleton, touch screens, joysticks).
Thus far, IDIAP have experimented with two teleoperation scenarios. The first involved manipulating and turning a valve. The robot was taught how to open the valve. It was given a set of different valve configurations from which it had to learn how to perform the valve opening task from new unseen valve positions. In the second scenario, Baxter was taught to do “hot stabbing,” a common ROV task that is often used to insert a hydraulic plug into a receptacle. The robot learned from an initial demonstration and was able to reproduce the motion . This machine learning framework is used to model the tasks that the operator performs and generate new task adaptive manipulation strategies.
Trackbacks for this post