Jacobs University Bremen is responsible for the simulation environment, which was delivered at M12, and the underwater perception system, which has passed the design phase. They hosted the consortium’s technical partners in Bremen this year for a technical workshop, which helped specify the system configuration and architecture.
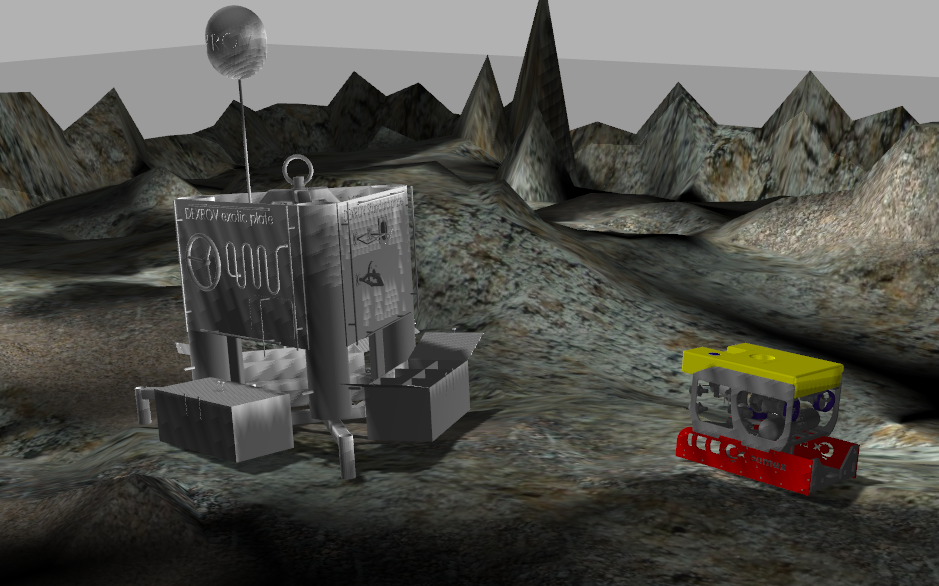
Jacobs’ first deliverable was to develop the DexROV simulation environment. This makes it possible for all partners to test and develop their software in an integrated simulation environment. The simulation environment accounts for the complexities of the real world environment such as the ship and the ROV systems and sensors. The simulation transparently imitates the command and feedback signals, so that developers can execute tests on any desktop computer. This makes multiple development and testing iterations possible in a shorter time frame and from any location. This will also be the simulation environment for the thorough validation of the final integrated system before executing it in the real scenario.
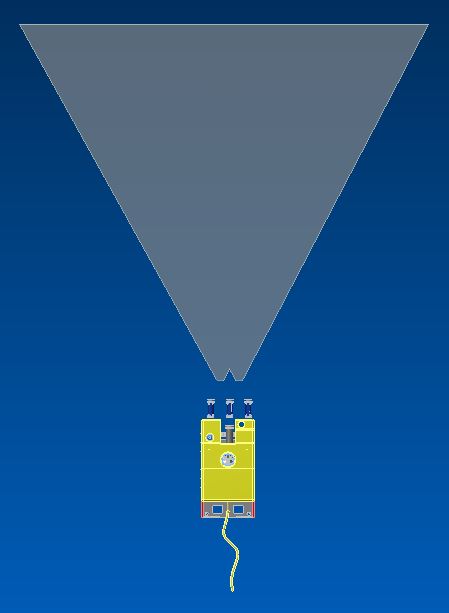
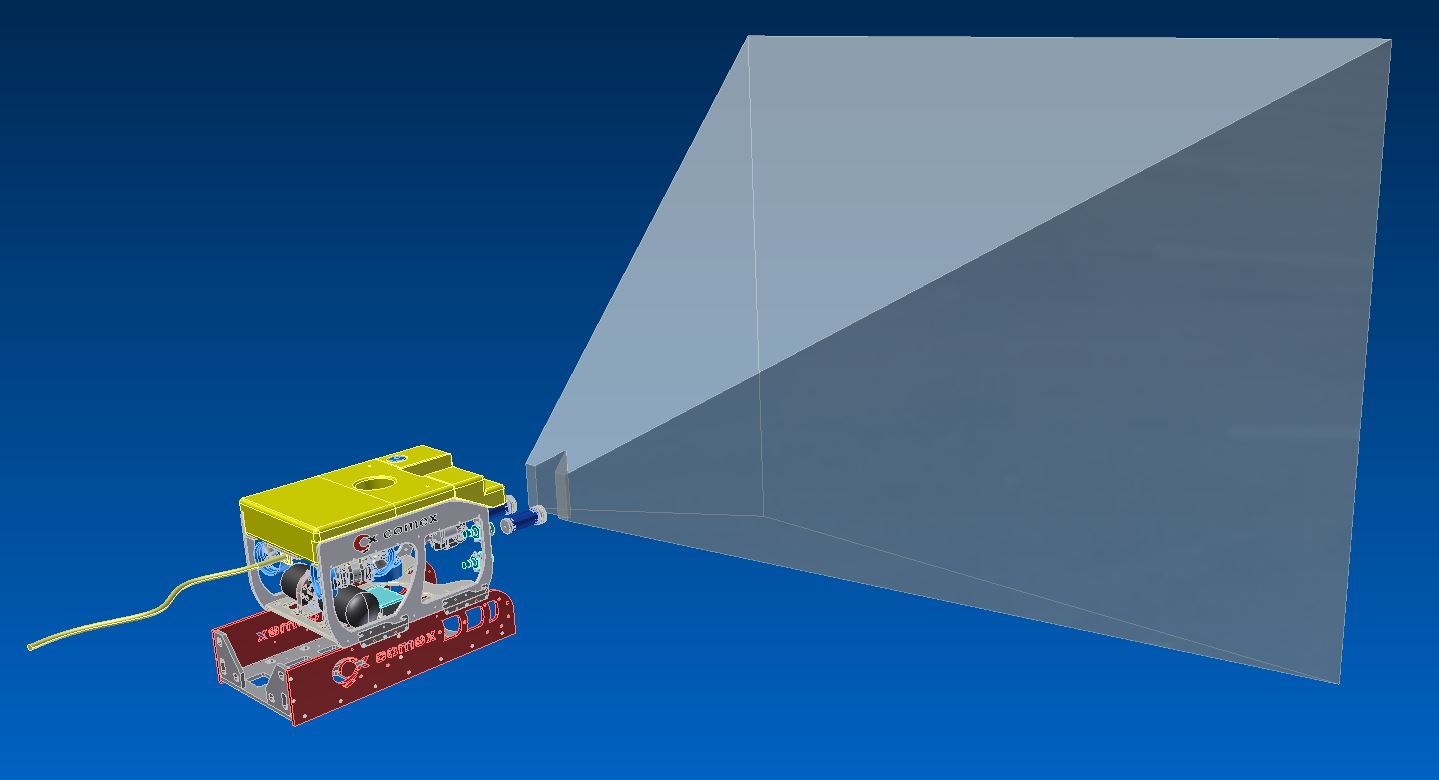
The underwater perception system uses multiple cameras to detect the structures and environment around DexROV and provides positioning information relative to those structures. The DexROV consortium anticipates good visibility at depths where DexROV may work in the future. The options available for modern camera systems provide high image frame rates and resolution, making optical sensors more effective than standard acoustic sensors.
The multi-camera system designed by Jacobs uses three high-resolution machine vision cameras. These determine the distance of objects within a 30cm to 5m field of vision from the robot. The images are processed to provide high-resolution 3D data that can generate 3D maps. This system will also detect objects that can be manipulated, such as levers or archaeological artefacts.
Feature image: DexROV simulation environment, with the test bed modelled for all developers.