PINAX Underwater Camera Calibration
Underwater camera calibration poses a difficult challenge due to the refraction that happens when light passes through the glass windows of underwater camera housings. Flat-pane windows offer a simpler and less expensive choice over dome housings, but they introduce significant distortions. To solve this, we have developed a new theoretical model dubbed pinax that combines a pin-hole and axial camera model. We provide licenses and a software module (PINAX) that derives accurate calibration values from in-air calibration patterns and water salinity indexes; thus replacing tedious in-water calibration procedures.
Direct sales, rental agreements, product tutorials, and applications specific software customisation are all possible.
Contact: Dr Andreas Birk, Jacobs University Bremen.
Technical description and applications
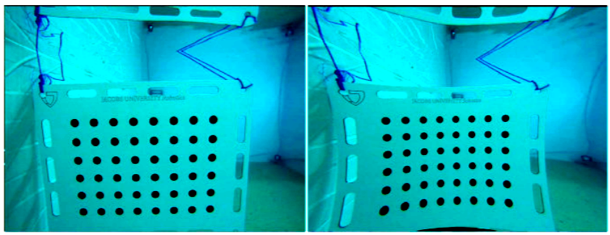
When using flat-pane underwater housings for cameras the light is refracted twice: first on the water-glass and then on the glass-water interface. These refraction effects cause the image to be distorted because a camera behind a flat glass panel in an underwater environment does not possess a single viewpoint; therefore, the classic pinhole model is not valid. This problem is addressed with the new PINAX (PINhole-AXial) camera model that allows for image rectification by mapping the captured underwater image to a rectified, pinhole camera viewpoint.
This method has been tested on multiple types of industrial cameras yielding higher quality results than direct underwater calibration i.e., recording a calibration pattern underwater. One of the main reasons is that the calibration pattern detection is commonly less accurate in distorted raw underwater images, which have low contrast and higher radial distortions due to water magnification artifacts. Instead, PINAX uses the camera’s physical model, water salinity and glass thickness to map the air-rectified image to its underwater model counterpart.
PINAX Underwater Camera Calibration Module can be used as part of any underwater system using cameras with flat-pane housings. Remote Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs) used for marine surveillance, archaeology, oil & gas inspections and deep-sea operations can benefit from the provided precisely rectified images; specially for close-range monitoring where acoustic sensors fail to provide high quality data and/or for enabling more accurate 3D computations from camera images.