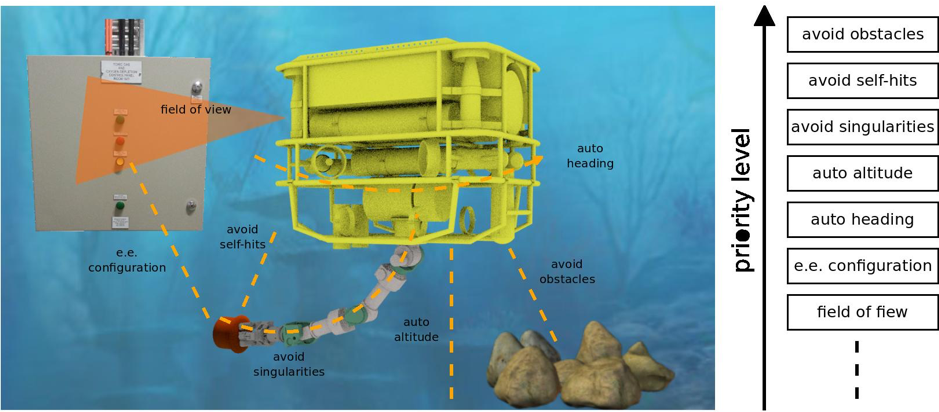
This is a software library aimed at controlling the whole vehicle-manipulator system by taking into account additional control objectives such as, obstacle avoidance, self-hit avoidance, joint-limit avoidance, etc. as well as optimization such as arm manipulability.
Based on Set-Based-Task-Priority inverse kinematics approach. It allows to define control objectives as well as to provide system variables to be controlled in a range, also defined as inequality constraints. It handles interaction with the environment.
This product is currently ready and available for investment for further maturation and customisation, and is not yet available for direct sale.
Contact: Dr Gianluca Antonelli, at UNICAS.
Technical description and applicaitons
Based on Set-Based-Task-Priority inverse kinematics approach. It allows to define control objectives as well as to provide system variables to be controlled in a range, also defined as inequality constraints. It handles interaction with the environment.
This software features:
– input: end-effector desired position/orientation; sensor readings (joint position; vehicle position; eventual wrench sensor; eventual perception system; eventual map)
– output: joint and/or vehicle reference velocities to be sent to the low level controller
– real-time;
– handle redundancy;
– handle interaction control problems;
– handle inequality constraints;
– handle both clamped and floating base cases;
– possible to customize to generic arm and vehicle actuating systems
By keeping the underwater scenario the SW allows to relieve the operator attention from the whole vehicle-robot system and focus on the end-effector. All the additional DOFs (Degrees of Freedoms) of the system are handled by the algorithm.
It can be used in a direct teleoperation architecture as well as in a pure autonomous mode robotic system or, as in DexROV, in a man-in-the-loop architecture.