
The Underwater Dexterous Gripper is an electrically-driven three-fingered gripper enabling dexterous manipulation tasks in the underwater domain.
It would be effective for underwater intervention requiring dexterous manipulation of objects, such as some operations in the fields of:
- underwater archaeology
- rescue
- construction, maintenance, and dismantling of underwater structure
- oil, gas and underwater resources
This product will be available for purchase from Graal Tech directly. Enquiries regarding investment for further maturation are welcome.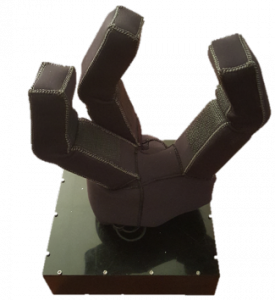
Contact: Graal Tech, info@graaltech.com
Technical description
Underwater dexterous gripper equipped with force/contact sensors enabling fine manipulation of objects and tool. It is a three-fingered anthropomorphic device with 7 independent motion axes, two for each finger plus one for the thumb abduction. It has been designed for grasping and manipulating the underwater tools normally used by professional divers while executing underwater intervention operations. Innovative pressure-tolerant contact sensors, mounted on each fingertip and on the palm, enable also the execution of delicate tasks, requiring a precise understanding of the interaction forces with the manipulated objects. The gripper can be easily mounted on the UMA electric manipulator and it is provided with its own embedded control system, enabling the control by a remote operator and also the execution of pre-defined motion primitives in autonomous mode.