Underwater Perception and Localization System
Deep sea underwater operations which include for instance manipulation, require high accuracy with regard to position and orientation estimation of ROV (Remotely Operated underwater Vehicle) and objects-of-interests. Our Underwater Perception and Localization System provides a framework which consists of capabilities facilitating various robotic tasks that require ROV self-localization, object recognition and scene modeling.
Direct sales, rental services, and applications specific customisation services are available to arrange through the nominated contact point.
Contact: Dr Andreas Birk, Jacobs University Bremen.
Technical description and applications
Our framework consists of three core modules:
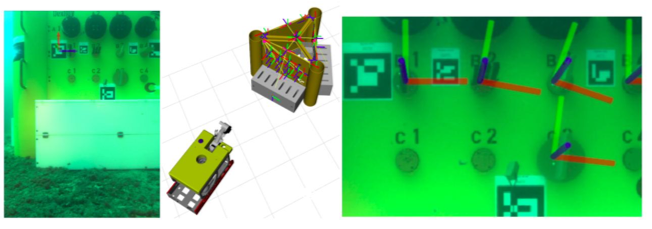
A knowledge-enabled object recognition module to identify objects and estimate their position and orientation from stereo camera images. In order to achieve the necessary high position and orientation estimation accuracy, this module exploits prior object knowledge such CAD models and fiducial reference points.
The ROV self-localizationmodule processes on-board sensory data gathered from various inputs such as a stereo camera system, an Inertial Navigation System (INS) and a Doppler Velocity Logger (DVL). Adapted state-of-the-art Kalman Filter is introduced to provide localization estimation under challenging deep sea conditions. Our self-localization module can be extended as well as modified with further inputs in order to enhance the accuracy of the localization estimates.
A scene modeling module generates dense 3D cartographical maps of observed scenes and objects which allow to augment and eventually enhance the ROV’s internal belief state. These generated maps can be introduced in various tasks such as for visualization and ROV navigation.
Our Underwater Perception and Localization System encompasses crucial modules necessary for emerging deep-sea operations which require accurate ROV state estimates in various tasks, for instance, surveying or inspection and manipulation of artificial structures.
Applications and scenarios range from archeology to industry, particularly oil & gas and emerging deep-sea mining industry.