ISME are responsible for the development of the controller that will enable autonomous capabilities for the DexROV system. The controller will coordinate multiple tasks together, while discerning and prioritising safety related activities in the event of latency. These tasks include positioning and navigation, as well as DexROV’s dexterous capabilities.
Because of satellite communication latency and intermittence (disruptions to the signal between DexROV and the control centre), the system must be able to continue to operate if the controller is unable to send commands for any period of time. The ROV must be sufficiently autonomous.
In order to achieve this goal, ISME are designing a controller that gives the vehicle the ability to carry out different tasks at the same time. These tasks are organised to prioritise safety-related tasks first. These tasks include obstacle avoidance and ROV positioning in underwater currents.
ISME must first define the basic tasks that the ROV must be able to carry out in the underwater environment and the operations that it will need to be able to perform. These tasks are both for the ROV’s navigation and its manipulation capabilities. Once these basic or elementary behaviours are defined, they will be prioritized and merged so that the system can perform both safely and accurately.
This work, of course, must be closely integrated with the work of other partner modules. The perception system (being developed by Jacobs) plays a key role, because the ROV needs to be aware of its surrounding environment to execute a priority action. The cognitive engine (being developed by IDIAP) is responsible for the ROV’s capacity to “understand” the operator’s intentions, sending the right commands to the vehicle while mitigating the potential effects of communication latencies.
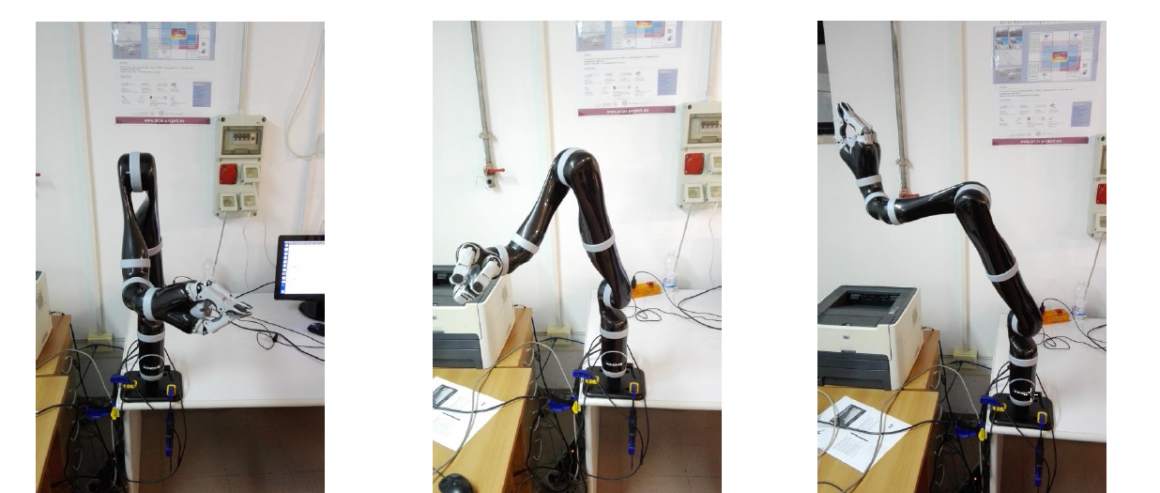
At the M12 mark, ISME are testing their control algorithms on a mock-up manipulator: the “Jaco2 Arm” manufactured by Kinova Robotics. This is not the same arm that will be mounted on the DexROV system, but the arm’s redundancy can be exploited for the multi-priority-based controller. Simulations for autonomous navigation are also under way to test and demonstrate elementary tasks until the official DexROV simulator has been delivered.